Miehittämättömät ilma-alukset, tuttavallisemmin droonit, ovat siirtyneet satavuotisen historiansa aikana pelkistä kaukosäätimellä ohjattavista leluista ja sotilaallisista tiedustelukoneista moderneiksi, autonomisiksi järjestelmiksi. Drooni edustaa yhtä jännittävintä teknologista rajapintaa, jossa koodi kohtaa aerodynamiikan.
Miehittämätön ilma-alus (UAV, Unmanned Aerial Vehicle) määritellään moottoroiduksi, ilmaa käyttäväksi laitteeksi, joka ei kuljeta ihmisoperaattoria. Se hyödyntää aerodynaamisia voimia nostovoiman tuottamiseen ja voi lentää joko etäohjattuna (Remotely Piloted Vehicle, RPV) tai täysin itsenäisesti aluksen omien tietokoneiden ohjaamana.
Nykyään puhutaan usein mieluummin miehittämättömästä ilma-alusjärjestelmästä (UAS, Unmanned Aircraft System), koska drooni itsessään on vain yksi osa kokonaisuutta. UAS sisältää itse lentolaitteen lisäksi maa-asemat (Ground Control Stations) ja koko ohjelmiston, joka mahdollistaa lennon hallinnan, valvonnan ja tehtävien suorittamisen.
Droonien kehityskaari osoittaa selkeän siirtymän puhtaasta RPV-ohjauksesta kohti yhä kehittyneempää autonomiaa.
Tämä tarkoittaa sitä, että droonien on kyettävä tekemään itsenäisiä päätöksiä lentoon vaikuttavista muuttujista ja ympäristöstä, mikä on elintärkeää esimerkiksi monimutkaisissa kartoitustehtävissä.
Siviiliräjähdys ja Teknologian Kypsyminen
Droonien käyttö alkoi laajentua voimakkaasti 2000-luvulla, kun ohjausteknologiat paranivat merkittävästi ja laitteistojen kustannukset laskivat. Tämä teknologinen muutos mahdollisti droonien laajentamisen harrastelusta ja ilmakuvauksesta kriittisiin siviilisovelluksiin.
Nykyään drooneja käytetään muun muassa tarkkuusmaataloudessa, metsäpalojen ja jokien seurannassa, sään havainnoinnissa, poliisitoimessa, infrastruktuurin tarkastuksissa ja tuotejakelussa. Nykypäivän drooneissa on runsaasti laskentatehoa ja kehitettyä koodia pienessä koossa, tehden niistä tehokkaita, mutta silti kohtuuhintaisia työkaluja.
Traficomin ohjeistus droonilentäjille
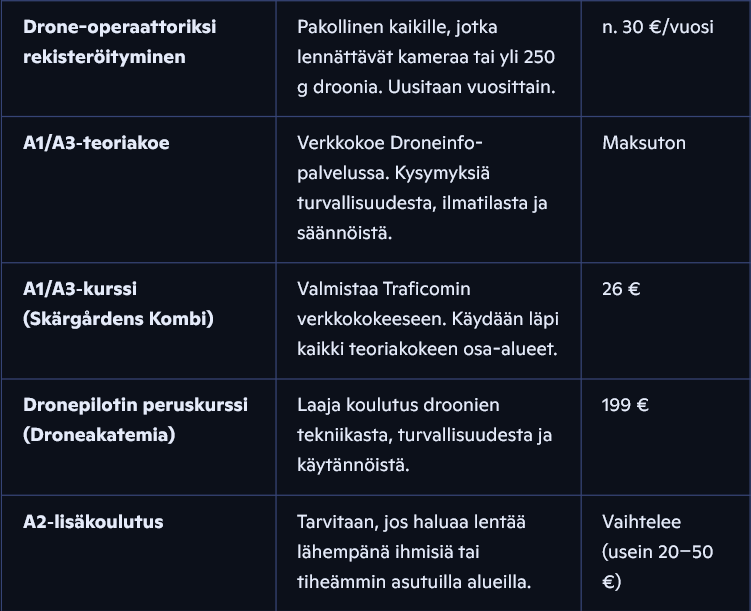
Traficomin mukaan lähes kaikkien droonilentäjien on rekisteröidyttävä drone-operaattoriksi ja suoritettava vähintään A1/A3‑teoriakoe, jos käytössä on kamera tai yli 250 g painava drooni. Rekisteröityminen ja koe tehdään verkossa Droneinfo‑palvelussa, ja rekisteröinti on pakollinen sekä harrastajille että ammattilaisille. Rekisteröinti maksaa vuosittain noin 30 euroa (Traficomin palvelumaksu), ja se on uusittava vuosittain. Teoriakoe on verkkotentti, jonka voi suorittaa kotona omalla tietokoneella. Tentti sisältää kysymyksiä turvallisuudesta, ilmatilarajoituksista, yksityisyydestä ja droonin teknisistä perusasioista. Kokeen läpäisy edellyttää perehtymistä Traficomin tarjoamaan oppimateriaaliin, joka on maksutonta ja saatavilla Droneinfo-sivustolla.
Kurssit ja koulutusvaihtoehdot
Suomessa ja EU-alueella on tarjolla useita kursseja, jotka auttavat valmistautumaan A1/A3‑kokeeseen ja syventämään osaamista:
- A1/A3‑peruskurssit: Näillä kursseilla käydään läpi kaikki teoriakokeen osa-alueet, kuten turvallinen lennättäminen, säädökset ja operaattorin vastuut. Esimerkiksi Skärgårdens Kombi tarjoaa A1/A3‑kurssin noin 26 eurolla, ja kurssi valmistaa suoraan Traficomin verkkokokeeseen.
- Dronepilotin peruskurssit: Laajemmat koulutukset, kuten Droneakatemian peruskurssi, tarjoavat syvällisempää tietoa droonien tekniikasta, riskienhallinnasta ja käytännön toiminnasta. Kurssit voivat sisältää kymmeniä oppitunteja ja maksaa noin 199 euroa.
- A2‑lisäkoulutus: Jos haluaa lentää lähempänä ihmisiä tai tiheämmin asutuilla alueilla, A2‑lisäkoulutus ja -tentti ovat tarpeen. A2‑kokeen voi suorittaa myös verkossa, mutta siihen liittyy käytännön omatoiminen harjoittelu.
Tentti ja sen suorittaminen
A1/A3‑tentti suoritetaan täysin verkossa Droneinfo-palvelussa. Tentti koostuu monivalintakysymyksistä, ja sen voi uusia tarvittaessa. Kokeen suorittaminen on maksutonta, mutta rekisteröityminen (n. 30 €/vuosi) on pakollinen, jotta lennättäminen on laillista. Tentti on suunniteltu niin, että myös aloittelijat voivat sen läpäistä, kunhan he ovat tutustuneet oppimateriaaliin.
Droonit Työelämässä: Ammatilliset Mahdollisuudet ja Uusi Talous
Droonit ovat teollisia työkaluja, jotka tarjoavat ratkaisuja perinteisten menetelmien puutteisiin. Ne luovat samalla kokonaan uusia ammattikuntia ja liiketoimintamalleja, erityisesti data- ja mallinnusintensiivisillä aloilla.
A. Kartoitus, Mittaus ja 3D-Mallinnus (Geospatial Data Specialists)
Perinteinen maanmittaus- ja kartoitusohjelma on altis ympäristön ja huonon sään vaikutuksille, ja se voi kärsiä riittämättömästä työvoimasta. Droonit tarjoavat näihin haasteisiin liikkuvan, joustavan ja mukautuvan vastauksen.
Drooneihin asennetut kameragimbaalit (näkyvän valon kamera, infrapunakamera) tai monispektriskannerit keräävät kuvadataa, joka ammattimaisen ohjelmistokäsittelyn jälkeen muunnetaan kolmiulotteisiksi pintamalleiksi. Tämä mahdollistaa esimerkiksi todellisten 3D-kaupunkimallien rakentamisen, joita päätöksentekijät voivat käyttää ympäristöanalyysiin, tontinvalintaan ja suunnittelun hallintaan.
Kartoitusta voidaan soveltaa myös laajempaan infrastruktuurin hallintaan. Sitä hyödynnetään sähkölinjojen, moottoriteiden ja rautateiden reitityksen suunnitteluun, tarjoten nopeasti suunnittelutietoa. Lisäksi teollisuusdrooneja käytetään kriittisten putkilinjojen (öljy ja maakaasu) reitityksen suunnitteluun ja valvontaan. Putkilinjan painetiedon ja kuvien yhdistelmä mahdollistaa jopa vuotoilmiöiden havaitsemisen reaaliajassa.
B. Valvonta ja Turvallisuus (Industrial Inspection Pilots)
Droonien kyky saavuttaa vaikeapääsyisiä paikkoja tekee niistä turvallisempia ja kustannustehokkaampia kuin perinteiset tarkastusmenetelmät. Droonit tarjoavat ainutlaatuisen lintuperspektiivin, jota voidaan hyödyntää esimerkiksi kattojen, siltarakenteiden ja suurten voimalinjojen tarkastamiseen.
Erikoiskäytössä drooneja käytetään tunnistamaan rakenteellisia vaurioita, kosteusongelmia ja muita vikoja. Esimerkiksi DJI Zenmuse H20T -sarjan kaltaiset hybridisensorit mahdollistavat samanaikaisesti näkyvän valon ja infrapunaskannausten tekemisen. Rakennusalalla droonit ovat keskeisessä roolissa työmaiden kartoituksessa, projektin edistymisen seurannassa ja turvallisuusriskien vähentämisessä vaarallisissa työympäristöissä.
C. Uudet Ammatit ja Tarvittavat Taidot
Droonien nousu on synnyttänyt uusia ammattikuntia, kuten drone-kartoittajat ja tietomallintajat rakennusalalla. Nämä roolit vaativat usein poikkitieteellistä osaamista, jossa yhdistyvät lentämisen tekninen taito ja syvällinen ymmärrys kerätystä datasta.
Tekoälyn ja koneoppimisen soveltaminen ei ole enää kustannuskysymys avoimen lähdekoodin työkalujen ansiosta, mutta droonialan menestykseen vaaditaan yhä enemmän data- ja tekoälyosaamista sisältöammattilaisten tueksi.
Kuitenkin ammattikäytön skaalautumisessa on havaittu merkittävä tekninen rajoite: hyötykuorman ja lentoajan suhde. Keskihintaiset UAV-laitteet soveltuvat erinomaisesti “lentäviksi kameroiksi”, mutta niiden akut ovat huomattavasti pienempiä kuin maassa liikkuvien UGV-laitteiden, mikä asettaa tiukemmat rajoitukset lisälaitteiden (kuten raskaiden LiDAR-skannerien) virransyötölle. Tämä fyysinen pullonkaula selittää, miksi vaativiin, autonomisiin teollisuustehtäviin tarvitaan edelleen kalliimpia ja suurempia droonijärjestelmiä, joiden akut kykenevät tukemaan merkittäviä hyötykuormia.
Markkinoiden Dynaamisuus: Droonivalmistajat ja Ammattimallit
Globaalit droonimarkkinat ovat keskittyneet muutamien suuryritysten ympärille, mutta erikoisaloilla toimii myös niche-valmistajia, jotka keskittyvät tiukasti teollisiin tarpeisiin.
A. Globaalit Johtajat ja Erikoisvalmistajat
Kiinalainen DJI on edelleen ylivoimainen markkinajohtaja sekä kuluttaja- että ammattidrooneissa. Sen tuotevalikoima kattaa kaiken aloittelijoiden minidrooneista raskaisiin teollisuusjärjestelmiin.
Muita merkittäviä globaaleja kilpailijoita ovat:
- Skydio: Tunnetaan tekoälyyn ja autonomiaan keskittyvistä drooneistaan, jotka ovat edelläkävijöitä esteiden väistelyssä.
- Autel Robotics: Vahva kilpailija kuluttaja- ja yritysdrooneissa, tarjoten usein hyvää kestävyyttä ja vaihtoehtoisia ratkaisuja DJI:lle.
- Quantum Systems ja Wingtra: Erikoistuneet korkean tarkkuuden kartoitukseen ja maastomallinnukseen, usein käyttäen kiinteäsiipisiä tai pystysuoraan nousevia/laskeutuvia (VTOL) ratkaisuja.
Suomessa on myös omaa osaamista; esimerkiksi Patria osti johtavan ammattikäyttöisten droonijärjestelmien valmistajan Nordic Dronesin.
B. Mallien Valinta Sovelluksen Mukaan
Ammattidroonin valinta riippuu aina tehtävän kriittisyydestä, vaaditusta tarkkuudesta ja budjetista. DJI:n mallit toimivat hyvänä esimerkkinä markkinoiden eriytyneisyydestä:
Elokuvatuotanto (Cinema)
- DJI Inspire 3: Tämä on tinkimätön valinta ammattielokuvantekijöille. Se tukee 8K/75fps RAW-videota Zenmuse X9-8K Air -kameralla ja tarjoaa vaihdettavat linssit. Sen suurin etu on Dual Control Solution, joka mahdollistaa kahden operaattorin itsenäisen ohjauksen – toinen lentää, toinen ohjaa kameraa – mikä on välttämätöntä suurissa tuotannoissa.
- DJI Mavic 3 Pro Cine: Erinomainen vaihtoehto kevyempään tuotantoon ja matkustamiseen. Se tukee Apple ProRes -formaattia ja kolmea eri polttoväliä. Vaikka se tarjoaa erinomaista kuvanlaatua, jotkut ammattilaiset saattavat pitää sitä silti liian “prosumer”-tason laitteena verrattuna Inspireen. Inspire 3:n kyky kuvata RAW-muodossa verrattuna Mavic 3:n ProResiin on kriittinen ero, sillä RAW-data mahdollistaa huomattavasti paremman värien muokkausvapauden jälkituotannossa (D-Log M).
Kartoitus ja Inspektion (Enterprise)
- DJI Matrice Series (esim. M350 RTK): Tämä on teollisuuden työkalu. RTK-ominaisuudet (Real-Time Kinematic) tekevät siitä välttämättömän tarkan geospaattisen datan keräämisessä, kartoituksessa ja infrastruktuurin tarkastuksessa. Matrice-sarja on suunniteltu kantamaan suuria hyötykuormia, kuten Lidar- ja monispektrisensoreita.
Ammattidroonin valintaa kuvaa parhaiten seuraava vertailu:
Ammattidroonin Valinta Tehtävän Mukaan (Ydinerot)
| Malli/Sarja | Päävalmistaja | Tarkoitettu Tehtävä | Kriittinen Ominaisuus | Huomioitavaa |
| Inspire 3 | DJI | Elokuvatuotanto (High-end) | 8K RAW, Vaihdettavat Linssit | Vaatii 2 operaattoria (Dual Control) |
| Matrice M350 RTK | DJI | Kartoitus, Vaativa Inspektion | RTK/PPK Tarkkuus, Raskas Hyötykuorma | Teollisuusstandardi, vaatii C2/C3 luokan pätevyyden |
| Mavic 3 Pro Cine | DJI | Prosumer/Kevyt Ammattifilmaus | Portability, Apple ProRes | Soveltuu erinomaisesti vloggerille ja kiinteistökuvaukseen |
| Skydio X2 | Skydio | Automaattinen Valvonta | Edistynyt Esteiden Välttely (Autonomy) | Nojaa vahvasti tekoälyyn |
Tarkemmin Tarkasteltuna: DJI Avata 2 – FPV drooni
DJI Avata 2 edustaa uuden sukupolven FPV (First Person View) -drooneja, jotka tekevät lentämisestä hauskaa ja entistä intuitiivisempaa yhdistämällä sulavan ohjattavuuden, kehittyneet turvaominaisuudet ja vaikuttavan kuvanlaadun yhteen ketterään pakettiin.
Samalla se tarjoaa aloittelijoille matalan kynnyksen päästä FPV‑lentämisen maailmaan ilman monimutkaisia säätöjä, ja kokeneille piloteille riittävästi suorituskykyä, reagointinopeutta ja luovaa vapautta toteuttaa näyttäviä manöövereitä. Avata 2:n parannettu vakaus, pidempi lentoaika ja entistä immersiivisempi FPV‑kokemus tekevät siitä kokonaisuuden, joka nostaa sekä harrastelentämisen että ilmakuvauksen uudelle tasolle.

A. Avata 2:n Ydinominaisuudet
Avata 2 on suunniteltu FPV-lentämiseen. Käyttäjät ovat kuvanneet sen lentotuntumaa erinomaiseksi FPV-drooniksi, jolla on riittävästi tehoa lentää varmasti myös täysin manuaalisessa tilassa. Laitteen teknisiin ominaisuuksiin kuuluu jopa 9 m/s nousunopeus Sport-tilassa. Kameran ISO-alue on 100–25600. Akun kapasiteetti on 2150 mAh.
Erityisesti aloittelijoille suositellaan DJI:n yhden käden liikkeitä seuraavaa Motion Controller -ohjainta, sillä se tekee FPV-kokemuksesta paljon helpomman ja hauskemman vasta-alkajille.


B. Integroitu Cinewhoop vs. DIY-Cinewhoop
Avata 2 on esimerkki “integroidusta cinewhoopista” – kopterista, joka on suunniteltu lentämään suljetuissa tiloissa tai lähellä kohteita suojakanavien (ducts) avulla.
Avata 2:ssa on jäykät muoviset suojakanavat (rigid plastic ducts) ja sisäänrakennettu lentokamera. Sen suuri etu on, että se ei vaadi monimutkaista viritystä (tuning) tai tärinänkorjausta (vibration), jotka ovat yleisiä ongelmia itse rakennetuissa FPV-koptereissa. Se on periaatteessa plug-and-play FPV-kokemus.
DIY-Cinewhoop, jonka harrastajat rakentavat itse, tarjoaa kuitenkin suuremman mukautettavuuden ja mahdollisuuden käyttää ulkoista, huippulaatuista kameraa, kuten “naked GoProta”, mikä voi tuottaa paremman kuvanlaadun ammattitöihin. DIY-mallit voivat myös olla merkittävästi kevyempiä (noin 250–300 grammaa) verrattuna Avata 2:n noin 400 gramman painoon, mikä voi olla etu tiukimpien säännösten alueilla. Toisaalta Avatan suljettu ekosysteemi (esim. O3-kuvalähetys) voi rajoittaa kantamaa verrattuna viritettyihin DIY-ratkaisuihin.
C. Elokuvalliset Asetukset
Avata 2:n suosio FPV-kuvaajana perustuu sen kykyyn tuottaa laadukasta materiaalia. Se pystyy kuvaamaan jopa 4K-resoluutiolla 100 kuvan sekuntinopeudella FPV-tilassa.
Cinematografisen lopputuloksen kannalta on suositeltavaa käyttää D-Log M -väriprofiilia. D-Log M on litteämpi (flat) väriprofiili, joka säilyttää enemmän yksityiskohtia varjoissa ja kirkkaissa kohdissa. Tällainen materiaali kuitenkin vaatii jälkikäsittelyä ja värimäärittelyä (Color Grading) esimerkiksi DaVinci Resolvella. D-Log M -profiilin valitseminen ja sen asianmukainen värimäärittely osoittaa, että FPV-työnkulku on kypsynyt vastaamaan perinteisen elokuvatuotannon vaatimuksia, joissa tiedon maksimointi kuvassa on ensisijaista ennen kuvan suoraa kulutusvalmiutta.
Lisäksi FPV-kuvauksen onnistumiseen vaikuttavat monet muut tekniset säädöt, kuten valotuksen ja valkotasapainon manuaalinen asettaminen, kuvasuhteen (4:3 vs. 16:9) valinta, kuvanopeus ja elektronisen kuvanvakaimen (EIS) käyttö.
Droonien Rakentelu itse: Komponenttien Valinta ja Hankintakanavat
FPV-harrastus ja droonien rakentelu ovat teknisen analyysin ja käytännön insinööriosaamisen yhdistelmiä. Toisin kuin valmisdroonit, DIY-kopterit tarjoavat täydellisen räätälöitävyyden. Osat voi valita itse ja apuna voidaan käyttää esim. 3D tulostusta.
A. DIY-Droonin Osien Anatomia
Droonin rakentaminen vaatii seuraavat pääkomponentit:
- Runko (Frame): Määrittää kopterin koon (esim. 5-tuumainen freestyle-runko) ja kestävyyden.
- Lento-ohjain (Flight Controller, FC): Droonin keskushermosto, jossa ajetaan laiteohjelmistoa, kuten Betaflight tai ArduCopter.
- Moottorit ja ESC (Electronic Speed Controller): Moottorin KV-arvo (kierrokset volttia kohti) määrittää lennon nopeuden ja vääntömomentin. ESC ohjaa moottoreiden tehoa FC:n käskyjen perusteella.
- VTX ja RX: Videolähetin (VTX) ja radiovastaanotin (RX) ovat elintärkeitä FPV-kokemukselle. Lähettimen laatu ja valittu protokolla (esim. ExpressLRS radiolle ja DJI O3 videolle) vaikuttavat kuvan viiveeseen ja kantamaan.
B. Mistä Osat Hankitaan?
Koska DIY-rakentelu perustuu usein avoimen lähdekoodin teknologiaan ja yhteisön tukeen, komponenttien hankinta on kansainvälistä. FPV-harrastajat luottavat usein erikoisliikkeisiin, jotka tarjoavat laajan valikoiman pieniä, räätälöitäviä osia.
- Kansainväliset FPV-erikoisliikkeet: Esimerkiksi GetFPV.com tarjoaa laajan valikoiman FPV-drooneja ja -osia, palvellen niin ammattilaisia kuin aloittelijoitakin. Nämä kaupat lähettävät tuotteita kansainvälisesti.
- Eurooppalaiset Kaupat: EU:n sisäisiä vaihtoehtoja ovat muun muassa NordFPV.com, joka sijaitsee Ruotsissa ja tarjoaa nopeita toimituksia useimpiin Euroopan maihin. Myös suuremmat eurooppalaiset jälleenmyyjät, kuten Copters.eu 29 ja Megadron (Puola) , tarjoavat valmiita DJI-drooneja ja erikoisosia.
- DIY-Kitit ja Rakennussarjat: Aloittelijoille EU-alueella on saatavilla myös rakennussarjoja (esim. Lynxmotion, iFlight), jotka helpottavat ensimmäisen kopterin kokoamista.
DIY-rakentelu on vahvasti sidoksissa yhteisöön ja avoimen lähdekoodin käyttöön. Vaikka itse komponentit ostetaan kaupoista, tekninen tieto, viritysvinkit (kuten Betaflightin säätö) ja ongelmanratkaisu tapahtuvat pääosin aktiivisissa FPV-yhteisöissä. Tämä eroaa suuresti kaupallisista, suljetuista järjestelmistä ja vaatii jatkuvaa oppimista ja koodaustaitojen hallintaa.
Lento-ohjainohjelmistot
Droonin “aivojen” valinta, eli lento-ohjaimen laiteohjelmisto, määrittää sen suorituskyvyn, käyttökohteen ja sen, miten autonomisesti tai manuaalisesti sitä voidaan lentää. Kolme suosituinta avoimen lähdekoodin ohjelmistoa – Betaflight, INAV ja ArduPilot – palvelevat hyvin erilaisia tarpeita.
A. Betaflight: Raaka Tuntuma ja Nopeus
Betaflight on optimoitu FPV-racingiin, freestyle-lentoon ja akrobaattiseen lentämiseen. Sen ydinajatus on tarjota lentäjälle mahdollisimman korkea responsiivisuus ja välitön, “raaka, yhdistetty tuntuma” manuaalisessa lennossa.
Betaflight mahdollistaa edistyneen PID-virityksen (Proportional-Integral-Derivative), jonka avulla harrastajat voivat hienosäätää droonin lento-ominaisuuksiaan äärimmäisen tarkasti. Se on ehdoton valinta niille, jotka haluavat täyden manuaalisen kontrollin ja suurimman mahdollisen nopeuden, tehden siitä parhaan laiteohjelmiston FPV-kilpailuihin.
B. ArduPilot (ArduCopter): Ammattitason Automaatio
ArduPilot – erityisesti sen kopteriversio ArduCopter – on suunniteltu tilanteisiin, joissa droonin on toimittava mahdollisimman luotettavasti ja autonomisesti. Toisin kuin Betaflight, joka keskittyy manuaaliseen lentotuntumaan, ArduPilot tarjoaa laajan valikoiman automaattisia lento-ominaisuuksia ja sensoreita, jotka tekevät siitä suositun työ- ja tutkimuskäytössä.
ArduPilotin keskeisiä vahvuuksia ovat:
- Autonomiset lentotilat: ArduPilot tukee GPS-pohjaisia lentotiloja, kuten Loiter, Return-to-Home, Auto Mission ja Follow Me. Näiden avulla drooni voi lentää ennalta suunniteltuja reittejä ilman jatkuvaa manuaalista ohjausta.
- Laaja sensorituki: Ohjelmisto hyödyntää useita sensoreita, kuten barometriä, GPS:ää, kompassia ja jopa lidar- tai tutkapohjaisia etäisyysmittareita. Tämä mahdollistaa tarkan korkeudenpidon, esteiden väistön ja vakaamman lennon myös haastavissa olosuhteissa.
- Monipuolinen laiteyhteensopivuus: ArduPilot toimii useiden eri lento-ohjainten kanssa, ja sen avoin lähdekoodi mahdollistaa laajat muokkausmahdollisuudet. Se sopii niin pieniin quad-koptereihin kuin suuriin, ammattikäyttöön tarkoitettuihin moniroottorisiin alustoihin.
- Tehtäväautomaatio (Mission Planner): ArduPilotin mukana käytettävä Mission Planner -ohjelmisto antaa käyttäjälle mahdollisuuden suunnitella monimutkaisia lentotehtäviä kartalla. Reitit, korkeudet, kameratriggerit ja muut toiminnot voidaan ohjelmoida etukäteen.
Kenelle ArduPilot sopii?
ArduPilot on paras valinta käyttäjille, jotka tarvitsevat drooniltaan muutakin kuin manuaalista lentämistä. Se sopii esimerkiksi:
- kartoitukseen ja fotogrammetriaan
- maatalouden valvontaan
- pelastus- ja etsintätehtäviin
- tutkimus- ja kehitysprojekteihin
- pitkän matkan ja pitkän lentoaikojen drooneihin
Siinä missä Betaflight on “lentäjän ohjelmisto”, ArduPilot on “operaattorin ohjelmisto”: se tarjoaa työkalut tehtävien suorittamiseen, ei niinkään akrobaattiseen lentämiseen.
C. INAV: Tasapainoinen Välimuoto
INAV sijoittuu Betaflightin ja ArduPilotin väliin. Se tarjoaa erinomaisen tuen GPS-avusteiselle navigoinnille, pitkän matkan lennoille ja “Palaa kotiin” (RTH) -toiminnoille. INAV on hyvä valinta harrastajille ja käyttäjille, jotka tarvitsevat vakaata lentämistä ja navigaatio-ominaisuuksia, mutta eivät ArduPilotin täyttä teho- tai tutkimusluokan autonomiaa. Se tukee myös erinomaisesti kiinteäsiipisiä lentolaitteita, toisin kuin Betaflight, joka on pääasiassa optimoitu monikoptereille.
Lento-ohjainohjelmistojen (FC Firmware) Vertailu
| Ohjelmisto | Optimointi | Paras Sovellus | Autonomia/Tarkkuus | Kriittinen Ero |
| Betaflight | Lennon Tuntuma | FPV Racing, Freestyle | Matala (Manuaaliohjaus) | Raaka, nopea reaktiivisuus |
| ArduPilot | Autonominen Tehtävän Suoritus | Kartoitus, Tutkimus, Logistiikka | Korkea (Mission Planning, GPS-tarkkuus) | Monimutkainen korkeus- ja navigaatiohallinta |
| INAV | Navigointi | Pitkän Matkan FPV (Tasapainoinen) | Keskitaso (GPS-Avusteinen) | Stabiilius, hyvä RTH-tuki |
Valinta näiden ohjelmistojen välillä heijastaa suoraan operaation riskiprofiilia: Betaflightia käytetään, kun lentäjän välitön hallinta ja ketteryys ovat tärkeimpiä. ArduPilotia käytetään, kun luotettavuus, autonominen tarkkuus ja kyky suorittaa tehtävä virheen sattuessa ovat kriittisiä.
Drooniparvien Ohjelmallinen Ohjaus: Taivaan Valoshow’t
Drooniparvien (drone swarm) ohjaus on autonomisen koodin ja taiteellisen suunnittelun huippu. Siinä ohjataan satoja tai jopa tuhansia drooneja samanaikaisesti, usein näyttävissä valoshow’issa.
A. Valoshow’n Konsepti ja Logistiikka
Droonivaloshow’t, Inteliin (Intel Shooting Star) liittyvän kehitystyön tunnetuksi tekemät, ovat nykyään yleisiä festivaaleilla, urheilutapahtumissa ja yritystilaisuuksissa. Tavoitteena on muuttaa yleisön käsitys drooneista sotilaallisista laitteista positiiviseen ja lumoavaan valoesitykseen.
Skaala on vaikuttava: drooniparvet voivat koostua sadoista, jopa kymmenistä tuhansista drooneista, joita ohjaa ohjelmallisesti vain yksi pilotti. Tällainen show vaatii mittavaa logistiikkaa ja kuukausien suunnittelua. Esimerkiksi 500 droonin esitys tarvitsee vähintään 340 x 300 metrin ilma-alueen, ja lennon turvallisuuden varmistamiseksi käytetään kahta geofenceä ja useita hätäprotokollia.
B. Ohjelmointi ja Parven Hallinta
Parviohjaus edellyttää kehittyneitä ohjelmistotyökaluja, jotka jakautuvat useisiin vaiheisiin: animaation suunnittelu, lentoradan validointi ja itse lennon suoritus (GCS, Ground Control Station).
Parviohjaus edellyttää kehittyneitä ohjelmistotyökaluja, jotka jakautuvat useisiin vaiheisiin: animaation suunnittelu, lentoradan validointi ja itse lennon suoritus (GCS, Ground Control Station). Jokainen vaihe muodostaa oman teknisen kokonaisuutensa, ja niiden yhteispeli ratkaisee, kuinka tarkasti ja turvallisesti parvi pystyy toteuttamaan suunnitellut liikkeet.
Suunnittelu ja simulointi
Parviohjauksen ensimmäinen vaihe on animaation tai koreografian suunnittelu. Tätä varten käytetään erikoisohjelmistoja, jotka mahdollistavat droonien liikeratojen, valotehosteiden ja muodostelmien mallintamisen kolmiulotteisessa ympäristössä. Suunnitteluvaiheessa voidaan määrittää jokaiselle droonille oma rooli, korkeus, nopeus ja aikataulu. Simulaattorit, kuten Gazebo tai Unity‑pohjaiset työkalut, auttavat testaamaan parven käyttäytymistä ilman riskiä laitteiden vaurioitumisesta.
Lentoratojen validointi ja turvallisuus
Kun animaatio on valmis, se täytyy validoida. Validointi varmistaa, että yksikään drooni ei törmää toiseen, ylitä sallittuja nopeuksia tai poikkea turvallisista etäisyyksistä. Ohjelmistot tarkistavat myös GPS‑riippuvuuden, tuulirajat ja mahdolliset häiriölähteet. Monissa järjestelmissä käytetään automaattisia törmäyksenestolaskelmia ja redundanssia, jotta parvi pysyy vakaana myös yksittäisen droonin vikatilanteessa.
Ground Control Station (GCS) ja reaaliaikainen hallinta
Lennon aikana parvea ohjataan GCS‑järjestelmällä, joka toimii operaattorin komentokeskuksena. GCS näyttää jokaisen droonin sijainnin, akun tilan, signaalin voimakkuuden ja mahdolliset varoitukset. Parviohjaus voi olla täysin autonomista, jolloin droonit seuraavat ennalta ladattua lentosuunnitelmaa, tai puoliautonomista, jolloin operaattori voi tehdä muutoksia lennon aikana. Järjestelmät, kuten QGroundControl tai Mission Planner, mahdollistavat reaaliaikaisen valvonnan ja tarvittaessa hätäkomennot, kuten koko parven välittömän laskeutumisen.
Kommunikaatio ja synkronointi
Parven onnistunut toiminta perustuu luotettavaan kommunikaatioon. Droonit voivat käyttää joko keskitettyä mallia, jossa kaikki komennot tulevat GCS:ltä, tai hajautettua mallia, jossa droonit kommunikoivat keskenään ja tekevät paikallisia päätöksiä. Hajautettu malli on erityisen hyödyllinen suurissa parvissa, koska se vähentää viiveitä ja parantaa vikasietoisuutta.
Ohjelmointirajapinnat ja automaatio
Parviohjaus hyödyntää usein avoimen lähdekoodin ohjelmistoja, kuten ROS (Robot Operating System), ArduPilotin skriptirajapintoja tai Python‑pohjaisia automaatiotyökaluja. Näiden avulla voidaan rakentaa omia algoritmeja esimerkiksi törmäyksenestoon, muodostelmien vaihtamiseen tai valoshow’n synkronointiin. Kehittyneimmissä järjestelmissä käytetään myös koneoppimista, joka optimoi parven käyttäytymistä ympäristön mukaan.
Ammattityökalut ja Arkkitehtuurit
Ammattimaisilla markkinoilla johtavia ratkaisuja tarjoavat:
- Skybrush Suite: Tarjoaa avoimen lähdekoodin ja kaupallisia versioita. Sen modulaarinen arkkitehtuuri sisältää Skybrush Studio:n (animaation suunnittelu), Skybrush Viewer:n (visualisointi) ja Skybrush Live:n (suoritus ja valvonta).
- SPH Engineering (Drone Show Software): Globaali markkinajohtaja, joka tukee yli 40 droonialustaa.
Koodin Logiikka ja Swarm Control
Ohjelmallinen ohjaus tehdään usein korkean tason kielillä, kuten Pythonilla, käyttämällä varta vasten parven hallintaan suunniteltuja kirjastoja (esim. Crazyflie-kirjastoissa). Yksi keskeinen ero on komentoja lähettävä toimintatapa:
- Sekventiaalinen (
swarm.sequential): Ohjelma kommunikoi droonien kanssa yksi kerrallaan ja odottaa, että edellinen drooni on suorittanut tehtävänsä. - Rinnakkainen (
swarm.parallel): Komento julkaistaan kaikille parven drooneille samanaikaisesti. - Turvallinen Rinnakkainen (
swarm.parallel_safe): Sama kuin rinnakkainen, mutta se hylkää komennon tai antaa poikkeuksen, jos jokin drooni antaa virheen, mikä estää yhden virheen leviämisen koko parveen.
Parviohjauksessa on kuitenkin huomioitava merkittävä tekninen haaste: sisäänrakennetun törmäyksenesto (collision avoidance) puute DIY-järjestelmissä. Koska droonit eivät välttämättä kommunikoi keskenään yhteistyössä ilman keskitettyä koordinointia, suunnitteluvaiheen (trajektorisuunnittelun) on oltava äärimmäisen tarkka, jotta satojen droonien ennalta ohjelmoidut lentoradat eivät risteä. Tästä syystä tutkimuspuolella kehitetään jatkuvasti uusia ratkaisuja, kuten JAX-pohjainen SwarmGPT, joka käyttää GPU-kiihdytettyä rata-analyysiä tehokkaaseen rinnakkaistamiseen ja optimointiin.
Yhteenveto
Droonit ovat nykyaikaisen teknologian ja koodin suora heijastus, jotka ovat muuttaneet ilmatilan toimintaympäristöksi niin taiteelle, tiedolle kuin teollisuudellekin. Niiden kehitys on tuonut ilmakuvauksen, kartoituksen, tutkimuksen ja viihteen kaikkien ulottuville tavalla, joka vielä vuosikymmen sitten olisi tuntunut futuristiselta. Samalla droonit ovat synnyttäneet kokonaan uuden harrastajakulttuurin, jossa elektroniikka, ohjelmistot, 3D‑tulostus ja yhteisöllinen ongelmanratkaisu kietoutuvat yhteen.
Ne eivät ole enää vain lentäviä kameroita, vaan monipuolisia työkaluja, jotka kykenevät autonomisiin tehtäviin, reaaliaikaiseen tiedonkeruuseen ja luoviin ilmaisuun. Droonien yleistyminen on myös pakottanut yhteiskunnan pohtimaan turvallisuutta, yksityisyyttä ja ilmatilan hallintaa uudella tavalla. Kokonaisuutena droonit edustavat teknologista murrosta, joka jatkaa laajenemistaan ja muokkaa tulevaisuuden ilmatilaa yhtä voimakkaasti kuin internet muokkasi tiedonvälitystä.
A. Droonien Kaksi Polku: Fysiikka ja Koodi
Droonimaailma on jakautunut kahteen päähaaraan, jotka vastaavat erilaisiin tarpeisiin ja teknisiin vaatimuksiin:
- FPV/Freestyle (Manuaalinen Ketteryys): Tämä polku, jonka ytimessä on Betaflight, korostaa lentäjän taitoa ja välitöntä hallintaa. Tässä maailmassa lentäjä on droonin tärkein sensori. Esimerkiksi DJI Avata 2 on tehnyt tämän ketterän FPV-tyylin saavutettavaksi suuremmalle yleisölle, samalla kun se on vakiinnuttanut elokuvatuotannon vaatimukset (D-Log M).
- Autonomia/Inspektio (Laskennallinen Tarkkuus): Tällä polulla, jota ArduPilot ja kaupalliset järjestelmät (kuten DJI Matrice RTK) edustavat, koodi ja tarkat geospaattiset tiedot ovat tärkeimmät. Nämä järjestelmät vaativat monimutkaisia ohjelmistoja ymmärtämään korkeutta (ASL, AGL) ja suorittamaan tehtäviä itsenäisesti.
B. Tulevaisuus on Ohjelmoitava
Droonien kehitys ei ole enää pelkästään laitteistokehitystä; se on yhä enemmän ohjelmointiin, tekoälyyn ja järjestelmäarkkitehtuuriin keskittyvää työtä. Droonit ovat kehittymässä tehokkaiksi laskentakoneiksi, jotka kantavat hyötykuorman fyysisen pullonkaulan rajoissa, ja joiden arvo syntyy kyvystä kerätä, käsitellä ja hyödyntää dataa autonomisesti.
Tulevaisuuden koodinkutoja droonialalla on henkilö, joka pystyy ymmärtämään ja ohjelmoimaan sekä yhden droonin ketteryyttä (PID-viritys Betaflightissa) että tuhansien droonien synkronoitua liikettä (parviohjaus Pythonilla ja Skybrushilla). Droonit eivät ole vain lentäviä laitteita, vaan ne ovat ohjelmoitavia robotteja, jotka toteuttavat koodia taivaalla.